Conditional Postural Synergies III: Grasp pose sampling
Table of Contents
In the two previous posts, we focused primarily on finger control. We
explored the representation and generation of grasp postures based on
high-level properties and we developed a force feedback controller
to grasp and release objects. However, the initial step in any
manipulation task is to initially grasp the target object. This usually
means providing the robot with both a grasp pose, which specifies the
position and orientation of the end-effector, and a grasp posture, i.e.
the finger configuration.
In this post, we will explore how to sample grasp poses with respect
to objects, i.e. hand positions and rotations, in order to execute several
precision grasps. The main idea behind our approach
(Dimou et al. 2022),
is to factor the grasp
sampling process into a set of cascaded steps. More specifically, our proposed
system consists of three separate models that generate a grasp posture, using
the postural synergies framework developed in the first post, and a position and
an orientation for the hand. Each model is conditioned on the outputs of the
previous one. The models are trained separately on a dataset of successful grasp
samples that are computed using a geometric heuristic.
Grasp sampling#
Generally, grasp sampling approaches are divided into analytical and data-driven
methods
(Sahbani et al. 2012).
Analytical approaches use a model of the object
and optimize a grasp quality metric in order to find the optimal contact
points. They require accurate contact modeling and the definition of cost
functions, while the optimization process can be time-consuming and
subject to local optima. On the other hand, data-driven approaches
(Bohg et al. 2013)
rely on large datasets of successful grasp examples, which are used
to train models to either: 1) approximate some success metric such as the
probability of successfully grasping an object, 2) directly
generate a candidate grasp using some kind of generative model.
We adopt a data-driven approach since we believe that is more appropriate
for real-world applications. So our first goal is to collect a dataset of
successful grasp examples for each grasp type and object. To achieve this
we design a geometric heuristic to compute candidate grasps which we execute
in simulation and collect the successful ones. We, then, train each model
on the collected dataset and, finally, we sequentially sample from each model
to generate new grasps.
Data Collection#
To get a successful grasp we first generate a candidate grasp posture by sampling from a trained CVAE model, similar to the one presented in the previous posts. This model is exclusively employed during the data generation process and is subsequently discarded. We generate grasps belonging to one of the following six precision grasp types: tripod, palmar pinch, parallel extension, writing tripod, lateral tripod, and tip pinch.



After we have a candidate grasp posture, we compute a candidate hand
position. In practice, we assume that the hand remains fixed at the
origin of the coordinate axis, and we calculate the candidate position
for the object within the hand’s reference frame.
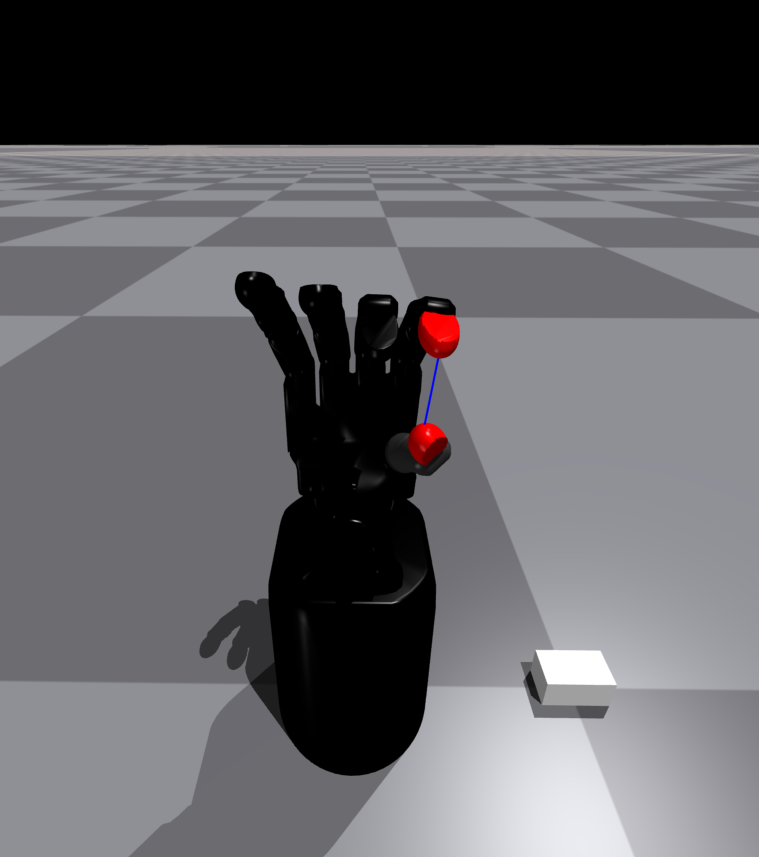
To compute the candidate object position we leverage the inherent
structure precision grasps
(Iberall & MacKenzie 1990).
Precision grasps rely on the opposition between specific finger joints,
known as opposition joints, to achieve stability. In particular, the
thumb and index fingers are commonly used to create what is known as
pad opposition. The axis connecting these finger segments is referred
to as the opposition axis. For each grasp posture, we have a pair of
opposition joints that results from the grasp type’s structure, as
well as an opposition axis that depends on the geometric arrangement
of the physical finger segments responsible for the opposition.
Based on the selected opposition joints for the given grasp type,
we employ forward kinematics to determine the Cartesian positions
of the two rigid bodies associated with these joints during the
execution of the grasp and compute their middle point. We then set
the center of mass of the object to that middle point, as it is
often observed that humans tend to grasp objects near their center
of mass to enhance stability, especially when using precision grasps.
To find a candidate object rotation we simply align one of the three
canonical axes of the object with the opposition axis.
Finally, the object is positioned according to the calculated pose, and the grasp is executed. We then shake the hand to filter out any unstable grasps and we activate gravity. If the object remains in the hand for 5 seconds after gravity is activated, the grasp is considered successful. At this point, several values such as the grasp type, the grasp size, etc. are recorded. We perform this procedure using Nvidia's IsaacGym simulator which allows us to run in parallel multiple environments. This way we can collect a large dataset of successful grasps in a matter of hours.
Proposed Model#
Our primary objective is to develop a model of the distribution of successful
grasps $P (G \mid C)$, where $G = (G_c, G_{pos}, G_{rot})$ represents
a successful grasp, consisting of the grasp configuration $G_c$,
represented by the finger joint angles, the 3D position $G_{pos}$,
and the 6DoF rotation $G_{rot}$ of the hand and $C$ represents
the properties of the grasp and the object.
In contrast to previous works that directly modeled the full distribution:
$$ P (G \mid C) = P (G_c, G_{pos}, G_{rot} \mid C),$$ we adopt a different
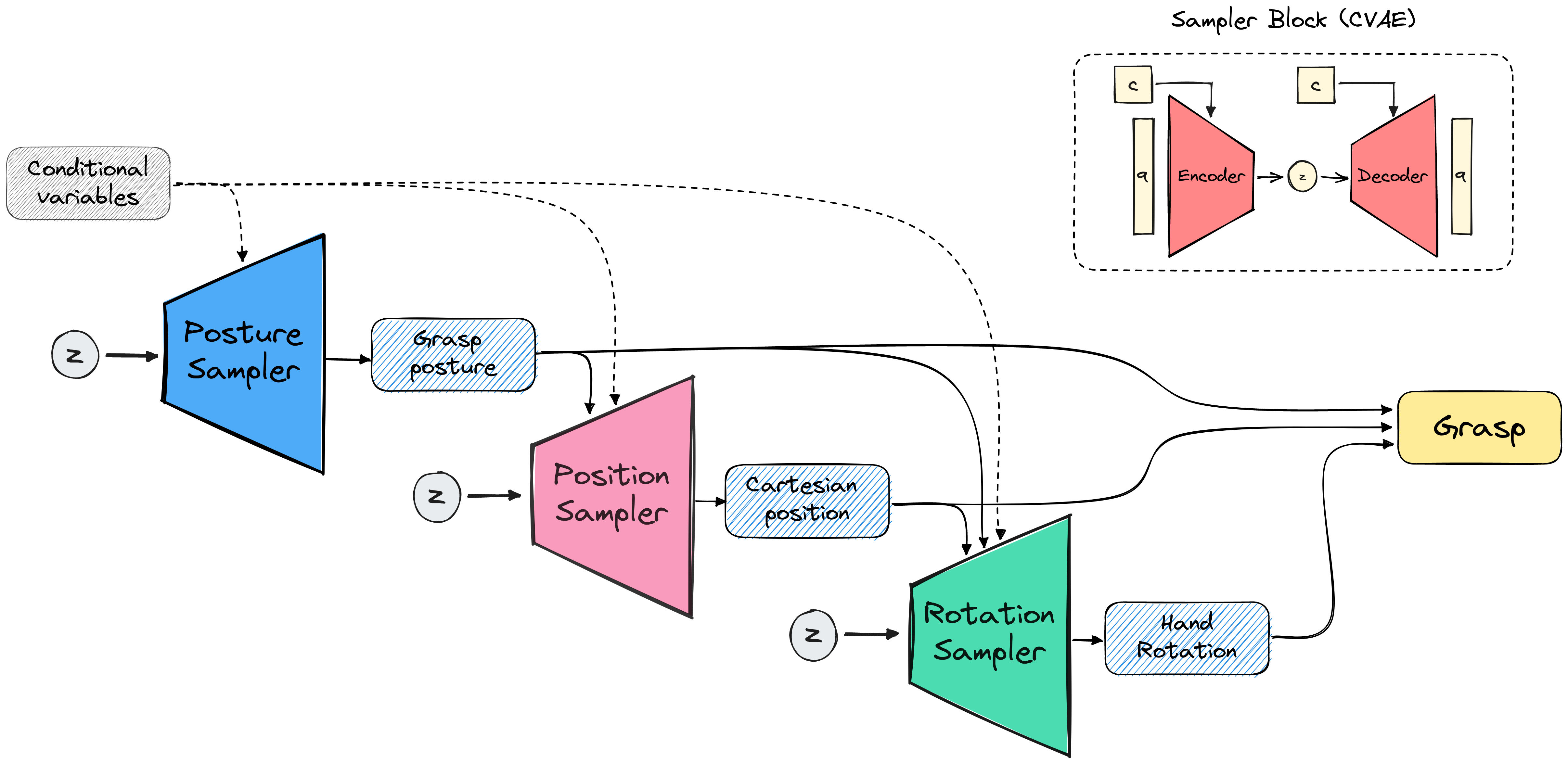
approach by factorising the distribution in its three components.
Specifically, we train three individual samplers: the Posture Sampler,
the Position Sampler, and the Rotation Sampler, each employing a CVAE architecture.
The Posture Sampler models the probability distribution:
$$ P(G_c \mid C),$$
which represents the finger configuration of the grasp and
is indicated by the angle values for each finger joint.
The Position Sampler models the probability distribution:
$$ P (G_{pos} \mid G_c, C)$$
which represents the 3D position of the hand w.r.t the object.
Finally, the Rotation Sampler models the probability distribution:
$$ P(G_{rot} \mid G_c, G_{pos}, C)$$
which represents the rotation of the hand using quaternions.
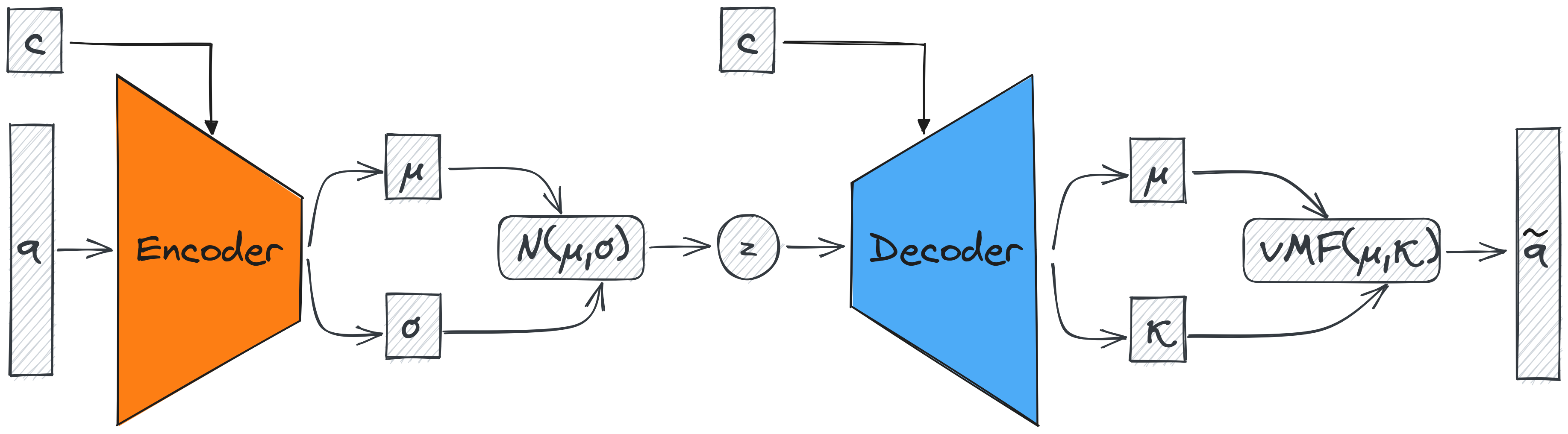
Instead of using directly the output of the CVAE to model
the rotation, the Rotation Sampler generates the mean direction
$\mu$ and concentration parameter $\kappa$ of a von Mises-Fisher
distribution whose samples are constrained to lie on the unit sphere
(Sra, S. 2016).
In practice, we use a differentiable implementation of the
von Mises-Fisher distribution
(Davidson et al. 2018),
to be able to apply gradient descent to train the model.
Finally, the rotation of the hand is sampled from the learned
von Mises-Fisher distribution. A graphical example of our model
is shown in the following figure.
To obtain grasp samples from the model, first, we sample a latent point from the prior distribution of the Posture sampler, and along with the corresponding conditional variables we feed them to the decoder of the model to generate a grasp posture. Then we perform the same procedure for the Position and Rotation samplers, each time adding the output of the previous models to the conditional variables. Finally, the generated grasp posture, hand position, and hand rotation form a complete grasp.
Results#
To test our hypothesis that factorizing the grasp into its components
better models the grasp distribution, we compared our proposed model
against using a single model to generate all modalities, as well as
using two models, one for grasp postures and another for poses
(position and rotation). The factorized model exhibited superior
performance in terms of grasp success rate. In addition, we compared
several variants of the factorized model to conclude which were the
best conditional variables to use, as well as to determine if using
the von Mises-Fisher distribution to represent rotations was better
than directly using the output of the CVAE. More details on our
experiments can be found in our paper.
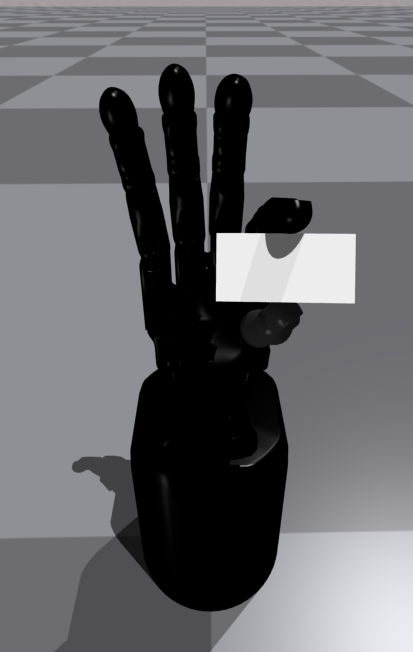
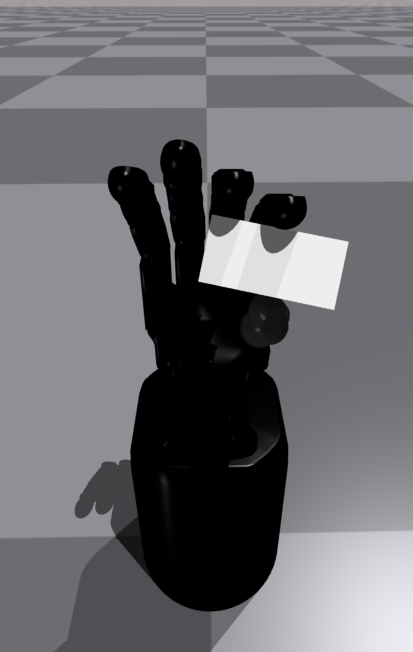
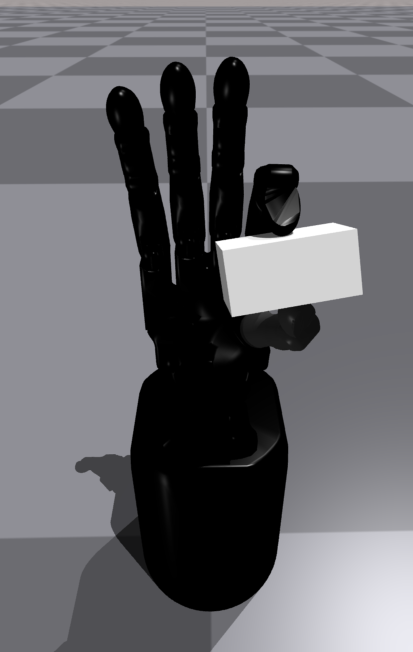
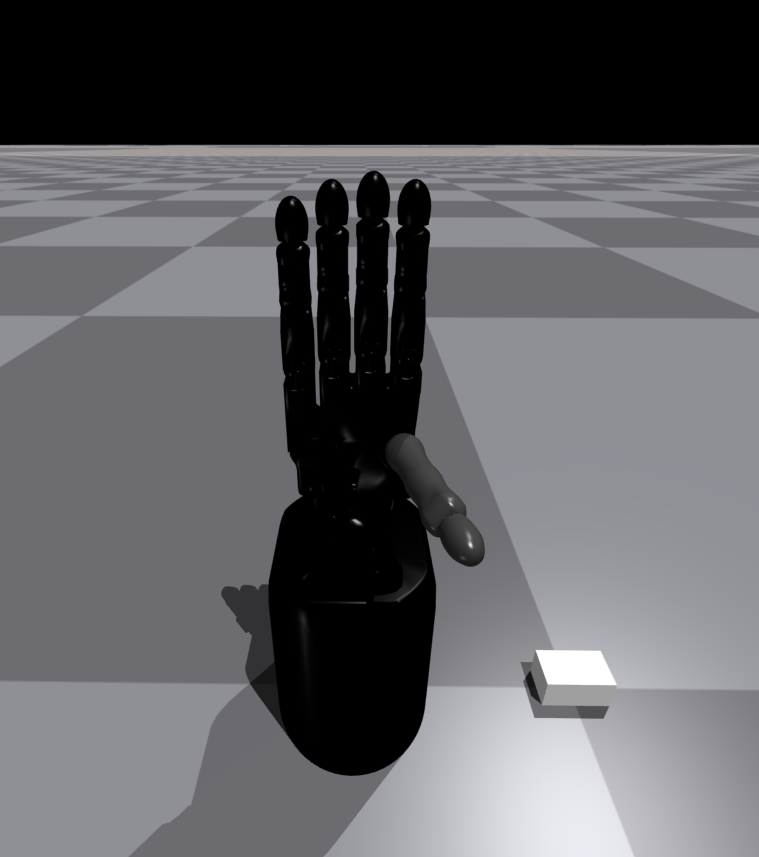
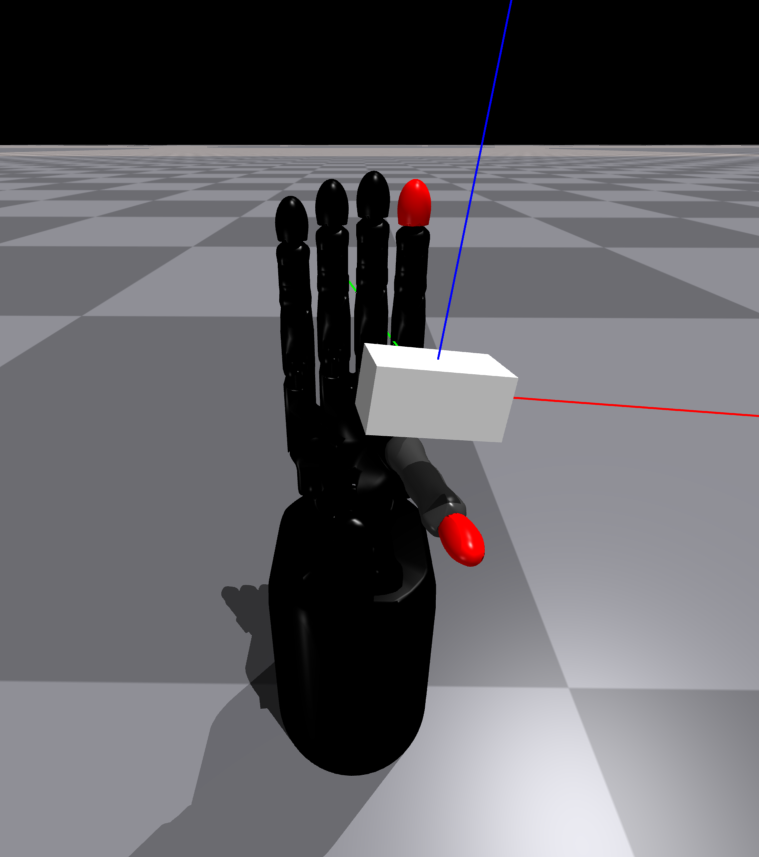
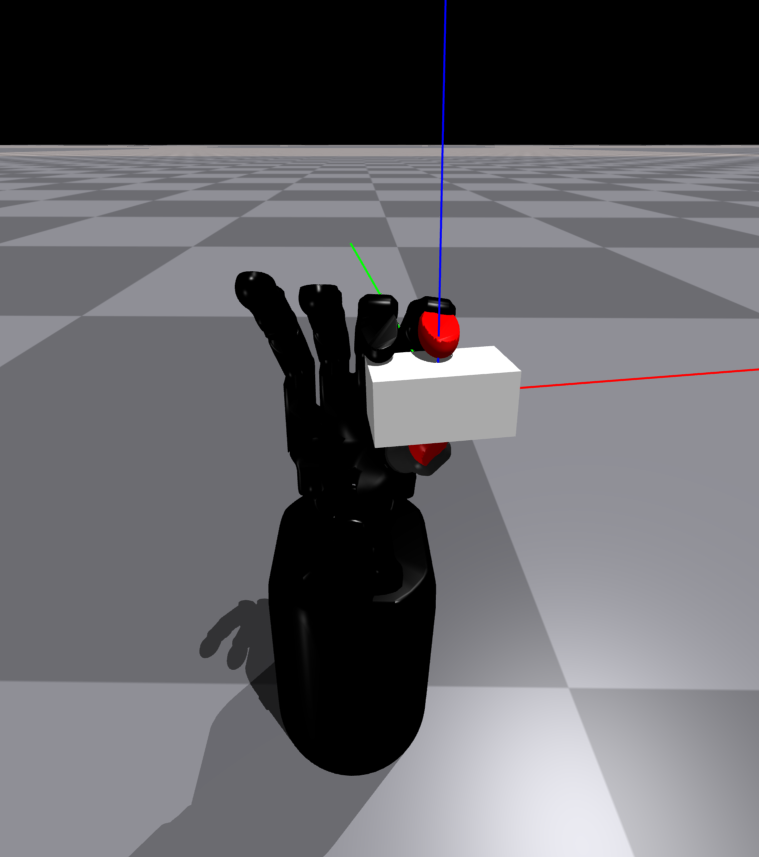
To employ our model in practical grasping tasks such as object pick-up,
we assume that the pose of the object is given by the perception system.
We then sample a grasp using our model, which is essentially the object
pose in the reference frame of the hand and transform it to the reference
frame of the object. We then check if there are no collisions with the
environment and execute the grasp, i.e. command the finger joint angles.
In the Figures below you can see some example grasps.
Conclusion#
In summary, we developed a factorized model to sample dexterous grasps for explicitly executing precision grasps. Our model employs three cascaded samplers: one for the finger configuration, one for the hand position, and one for the hand rotation, where each sampler is implemented using a CVAE. The model is trained on a dataset of successful grasp examples collected using a geometric heuristic in simulation.
References#
[1] Dimou et al. “Grasp Pose Sampling for Precision Grasp Types with Multi-fingered Robotic Hands.” Humanoids, 2022.[2] Sahbani et al. “An overview of 3D object grasp synthesis algorithms.” Robotics and Autonomous Systems, 2012.
[3] Bohg et al. “Data-Driven Grasp Synthesis—A Survey.” Transactions on Robotics, 2013.
[4] Iberall & MacKenzie "Opposition space and human prehension." Springer, 1990.
[5] Sra, S. "Directional Statistics in Machine Learning: A Brief Review." Applied Directional Statistics, 2016.
[6] Davidson et al. "Hyperspherical Variational Auto-Encoders." Uncertainty in Artificial Intelligence, 2018.